![]()
LUMS Student & WIT Researcher Present Findings at Prestigious Conference in Australia
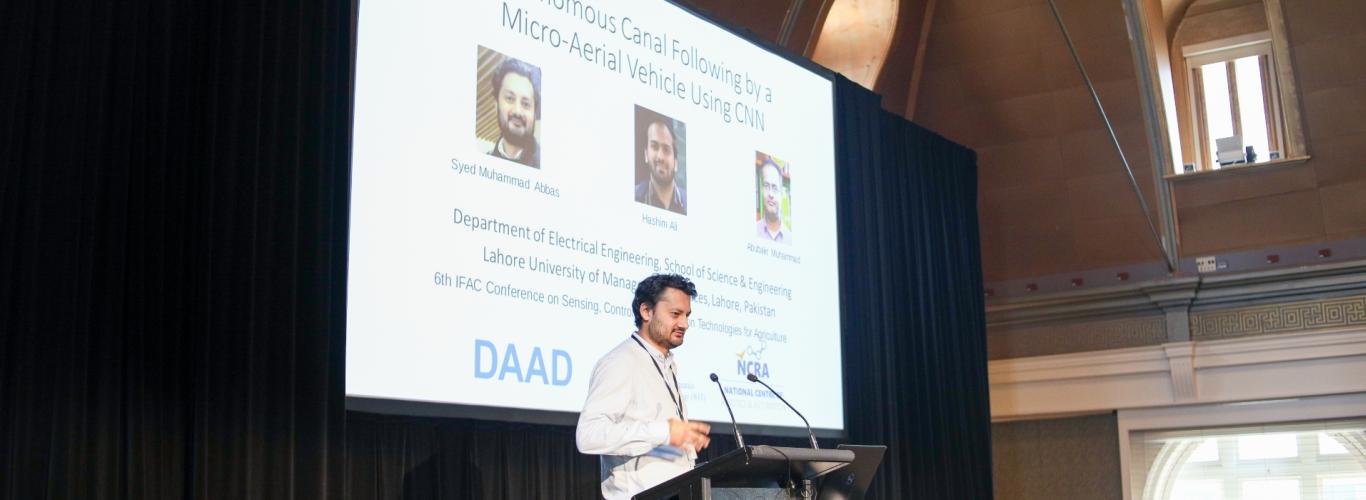



LUMS students continue to make their mark at international platforms. Syed Muhammad Abbas, a PhD candidate at the Syed Babar Ali School of Science and Engineering and a Research Associate at the Centre for Water Informatics and Technology (WIT), LUMS, recently presented his research at AgriControl 2019 - the 6th International Federation of Automatic Control (IFAC) on Sensing, Control and Automation Technologies for Agriculture. The peer-reviewed conference was hosted by the University of New South Wales (UNSW) in Sydney, Australia from December 4-6, 2019 and aimed to promote and disseminate sensing, control and automation research directed at agriculture.
The conference scope spread over areas of fundamental, developmental, as well as applied and experimental work from the researchers working on the broader area of agricultural automation and was attended by leading researchers in this domain from around the globe.
Mr. Abbas presented his research paper, ‘Autonomous Canal Following by a Micro-Aerial Vehicle Using Deep CNN’, with his advisor, Dr. Abubakr Muhammad, Director, Centre for Water Informatics and Technology (WIT), LUMS. The paper was co-authored by Hashim Ali, a LUMS MS Electrical Engineering graduate and Research Associate at WIT. The motivation for the paper was to propose an autonomous navigation system for a Micro Aerial Vehicle to traverse the length of a water canal without any human intervention. Canal traversal is an important and periodic operation performed frequently to estimate the canal bank erosion, silt accumulation and structural damages indicted over time, which significantly reduces the water carrying capacity of water channels.
The paper proposed an aerial autonomous canal traversal system using ResNet50 inspired deep convolutional neural network (CNN). Given the uniqueness of the problem, a dataset was generated for supervised learning and validation, and the proposed approach was later evaluated on a real canal. This approach was implemented on a COTS micro aerial vehicle. The system was designed in such a way that it takes 200ms from perception to action thereby making the system real-time. The superior performance of customised ResNet50 inspired network was also compared with other state-of-the-art CNNs trained on the canal datasets.